Control
This page showcases selected control projects, ranging from model-based control methods to learning-based manipulation and perception techniques. These works highlight my experience in mechanism design, actuator packaging, and integrated system development.
Projects
|
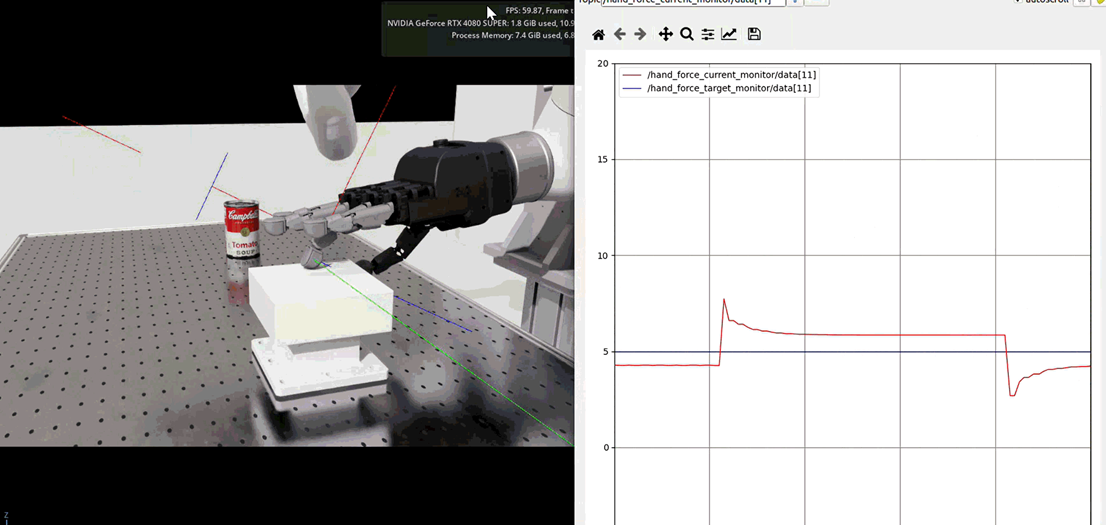
HAND Admittance Control
|
|
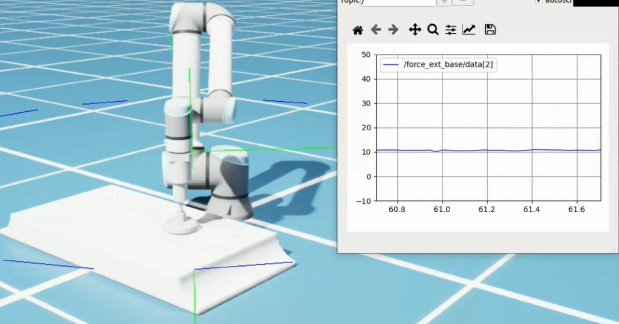
Manipulator Admittance Control using F/T Sensor
|
|
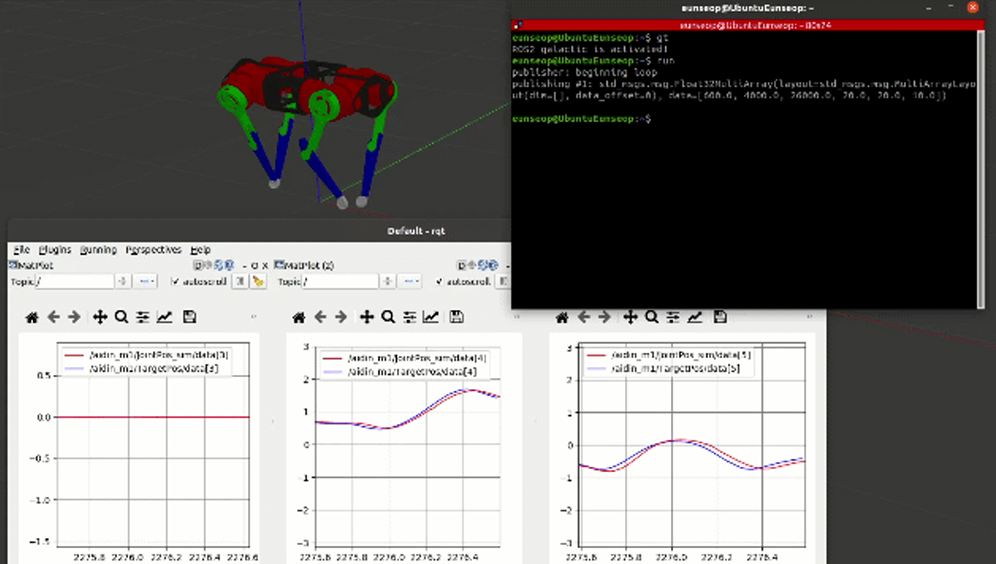
Quadruped Walking Roobot Control
|